Unit V
Image Transforms
Orthogonal Transform
// Ortho transform
A⁻¹ = Aᵀ
Unitary Transform
// Unitary transform
A⁻¹ = A*ᵀ = Conjugate(Aᵀ)
Properties of Image Transforms
// Symmetric
A == Aᵀ
// Orthogonal
A x A⁻¹ == A x Aᵀ == I
// Unitary
A x A⁻¹ == A x A*ᵀ == I
// Hermitian
A x A⁻¹ == A x A*ᵀ == A
// Interchange: if both A & B are symmetric, real, and orthogonal, then
A = P x B x Q === B = P x A x Q
Hadamard Transform
- It is a symmetric, non-sinusoidal function
// H (2x2)
H = (1 / sqrt(2)) | 1 1 |
| 1 -1 |
// H (4x4)
H = (1 / sqrt(4)) | H H |
| H -H |
= (1 / sqrt(4)) | 1 1 1 1 |
| 1 -1 1 -1 |
| 1 1 -1 -1 |
| 1 -1 -1 1 |
// Similarly, H(8x8)
H = | H H |
| H -H |
// One dimensional Haramard transform
F = H x f(x)
// Two dimensional Haramard transform
F = H x f(x, y) x Hᵀ // which can be simplified to
F = H x f(x, y) x H
- Sequencing is the number of sign changes in each row.
N x 1
Haar Transform
- Low computing requirement.
- Great for image processing and pattern recognition.
- Haar transforms are efficient for 2D image processing because of their wavelet-like structure.
- Real and orthogonal.
- Separable and symmetric.
- Sequentially ordered.
- Poor image compression.
Procedure to Generate Kernel of Haar
// Find the order N, and compute
n = log2(N)
// Determine p
p = [0, n - 1]
// Determine q
if(p == 0) { q = [0, 1] }
else{ 1 ≤ q ≤ 2^p }
// Determine k
k = 2^p + q - 1
// Apply the Haar function making necessary changes
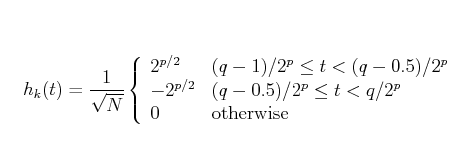
Resultant Haar Matrix

KL Transform
- Unlike spatial and frequency based filters, KL transform works on statistical properties.
- Mean, variance, standard deviation.
// Transform equation
Y = A (X - mean)
/* Y > output
* A > KL transform matrix
* X > object vector (x, y)
* mean > Mean(X) */
- Object vector
Xis formed by(x, y)location of1sin the image. - Origin of axis is oriented at bottom left.
Procedure
- Calculate
Mean(X) - Calculate covariance matrix
Ci = (Xi - Mean(X)) x (xi - Mean(X))ᵀ // 2x2 matrix
- Calculate
Mean(C) - Find the Eigen vectors and Eigen values
| C | = | C11 - λ C12 | = 0
| C21 C22 - λ |
- Form quadratic equation and solve for
λto findλ1andλ2.
IMPORTANT
Number/assign λ1, λ2, λn such that their magnitudes are in decreasing order
| λ1 | > | λ2 | > ... > | λn |
- Solve for Eigen equation to get Eigen vectors
// Vector corresponding to λ1
| C11 - λ1 C12 | * | x_λ1 | = 0
| C21 C22 - λ1 | | y_λ1 |
// Vector corresponding to λ2
| C11 - λ2 C12 | * | x_λ2 | = 0
| C21 C22 - λ2 | | y_λ2 |
- Generate KL transform matrix
A
A = | x_λ1 x_λ2 ... x_λn |
| y_λ1 y_λ2 ... y_λ1 |
- Plug all the values in the KL transform equation
Solved Example Sample Problem
Skipped Topics
- Two dimensional discrete fourier transform
- Discrete cosine transform
- Discrete sine transform